Autonomous Rover
This project involves the development of a compact, all-terrain autonomous rover designed for real-time navigation, obstacle avoidance, and environment monitoring. The system is built on a Raspberry Pi 4 with optional ESP32 integration for modular sensor control. It features GPS-based positioning, motor encoders, and IMU sensors for localization, combined with computer vision and AI for path planning and object detection. The chassis is based on the full-metal 4WD platform, supporting robust maneuverability.
image
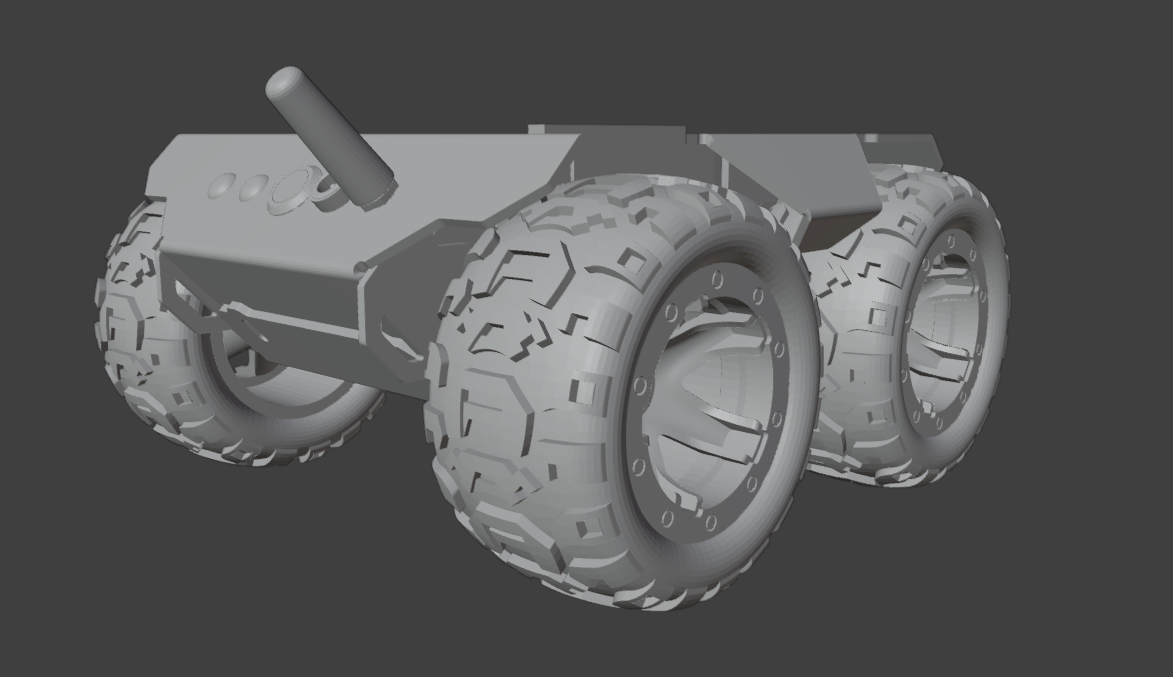
Rover from outside